
Кроковий двигун для ЧПУ: як визначитися із вибором?
Одна з головних відмінностей сучасного верстата з ЧПК від «класичних» моделей з ручним управлінням – відсутність кінематичного зв’язку між механізмами, які відповідають за переміщення робочих органів та обертання шпинделя. Роздільний привід дозволяє відмовитися від використання багатоступінчастих коробок передач, механічних ділильних головок, довірити складні розрахунки комп’ютеру.
Але щоб переміщення були точними, а верстат завжди розумів, в якій точці знаходиться ріжучий інструмент в даний момент часу, привід повинен мати певні параметри. У механізмах верстата з ЧПУ найкраще з цими завданнями справляються крокові двигуни: компактні «слухняні» в управлінні та порівняно недорогі. Дізнатись подробнее по ссылке.
У цій статті ми розповімо про роботу цих пристроїв, спробуємо знайти їхні недоліки та підібрати альтернативні варіанти.
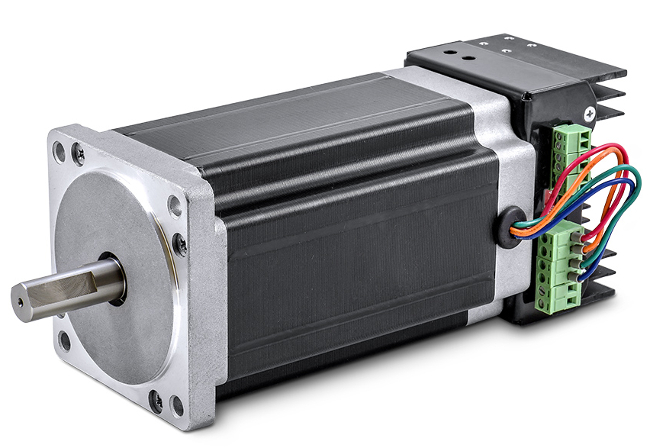
Кроковий двигун у верстаті з ЧПУ
Які критерії визначають для вибору?
Треба пам’ятати про те, що, в порівнянні зі звичайними двигунами, крокові вимагають складніших схем для керування. А критеріїв не так багато.
Параметр індуктивності.
Перший крок – визначення квадратного кореня з індуктивності обмотки. Результат потім множимо на 32. Значення, отримане як результат, потім потрібно порівнювати з напругою джерела, від якого йде до драйверу.
Ці числа не повинні відрізнятися один від одного надто сильно. Мотор буде грітися і шуміти занадто сильно, якщо напруга живлення більша за отримане значення на 30 і більше %. Якщо ж він менший, то, у міру наростання швидкості, момент, що крутить, зменшується. Чим більша індуктивність – тим простіше зберегти високий крутний момент. Але для цього треба підібрати драйвер, що має велику напругу живлення. Тільки у цьому випадку кроковий двигун працює нормально.
Графік того, як момент, що крутить, і швидкість залежать один від одного.
Це дозволить зрозуміти, наскільки двигун у принципі відповідає запитам та технічним завданням.
Параметри геометричного плана
Особливу увагу рекомендується приділити діаметру валу, фланцю та довжині двигуна.
Крім того, такі показники також рекомендується уважно вивчити:
- Максимальний статичний синхронізуючий момент.
- Момент з інерції у роторів.
- Струм усередині фази за номіналом.
- Загальне опір фаз омічного типу.
Види управління
Крім вже розглянутих режимів – повно-, напів- та мікро-, – є й інші, що визначають, як сигнали подаються на полюси і, як працює кроковий мотор. Розглянемо два принципово різні їх типи.
Без контролера
Реалізується завдяки Н-мосту (часто саме так і називається), що дозволяє практично миттєво перемикати полярність та забезпечувати швидкий реверс. Система вибудовується на транзисторах та/або мікросхемах: вибрані ЕРЕ гарантують логічний ланцюжок, яким переміщуються ключі. Підходить для безколекторних моделей.
Як працює кроковий двигун
Згідно з цією схемою, напруга йде від джерела живлення до мосту. Контакти включаються попарно (S1-S4 та S3-S2), завдяки чому струм проходить через обмотки, запускаючи обертання у потрібну сторону.
З контролером
Погляньмо на нього докладніше, адже він визначає, як працює і що таке кроковий електродвигун: це електронний блок, який формує послідовність сигналів та посилає їх на котушки статора. Щоб він не вийшов з ладу при виникненні аварійної ситуації (наприклад, при короткому замиканні), висновки приводу забезпечують діодами, що не пропускають зворотні імпульси. Дає можливість реалізувати різні режими.